
Systems of Systems & Integration
Annual PlanIntelligent Reconnaissance: Combining Sensor Fusion and Cooperative Control Strategies to Enable the Unmanned Reconnaissance Missions of the Future
Project Team
Government
Denise Rizzo, William Smith, U.S. Army GVSC
Industry
Frank Koss, Andrew Dallas, SoarTech
Student
Michael Quann, University of Michigan
Project Summary
Work begins in 2016 and was completed in 2018.
Reconnaissance is a task that is particularly well suited for an intelligent vehicle system, as computers can observe a region for features of interest continuously using several methods of sensing. As the technologies are developed that will enable such a vehicle to unburden the occupants of certain reconnaissance tasks, there is a need for coordination and networking of these vehicles.
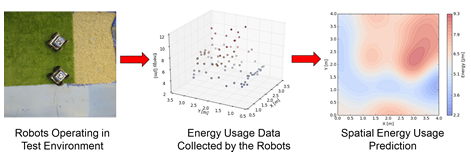
In this project, we will develop control strategies to coordinate a reconnaissance mission using a collection of unmanned ground and air vehicles in challenging terrain, where certain vehicles are capable of providing additional energy to the smaller assets.
This control architecture presents new management challenges given the specific combination of cooperative control and sensor data fusion management: (1) a new approach for cooperative control of a continuously evolving system will require new stability and robustness laws to ensure stable system behavior in the presence of variation and uncertainties; (2) the fusion of multiple sources of data from ground and/or aerial vehicles will require the development of a new data fusion algorithm that enables real-time decision making in the field; and (3) optimization techniques that utilize mission sensor data to update the terrain maps, and optimal strategies for conducting a reconnaissance mission under a variety of vehicle, terrain, and situational conditions.
Publications:
- Quann, M., Ojeda, L., Smith, W., Rizzo, D., Castanier, M., and Barton, K., “Ground Robot Terrain Mapping and Energy Prediction in Environments with 3-D Topography”, submitted to American Control Conference, June 2018.
- Quann, M., Ojeda, L., Smith, W., Rizzo, D., Castanier, M., and Barton, K., “Probabilistic Terrain-Based Energy Prediction for Multi-Robot Reconnaissance”, to be submitted to IEEE Transactions on Robotics, (in preparation).
- Quann, M., Ojeda, L., and Barton, K., “Terrain Mapping and Energy Prediction for Ground Robot Decision-Making” to be presented at SAE World Congress session on Modeling and Simulation of Military Ground Vehicles.
- Quann, M., Ojeda, L., Smith, W., Rizzo, D., Castanier, M., and Barton, K., “An Energy-Efficient Method for Multi-Robot Reconnaissance in an Unknown Environment”, presented at American Control Conference, May 2017.
References:
- Quann, M., & Barton, K. (2015b, October). An Iterative Learning Control Approach to Multi-Agent Formations. In Dynamic Systems and Control Conference (DSCC), 2015. ASME.
- Altın, B., & Barton, K. (2014). Robust iterative learning for high precision motion control through L1 adaptive feedback. Mechatronics, 24(6), 549-561.