
Systems of Systems & Integration
Annual PlanSituational Awareness and Sustained Survivability through Man/Unmanned Teaming
Project Team
Government
Thomas Meitzler, Neil Cooper, Robert Severinghaus, U.S. Army GVSC
Industry
Andrew Dallas, SoarTech
Student
William Bentz, James Usevitch, University of Michigan
Project Summary
Project started in 2016 and was completed in 2018.
This project is motivated by the need for protection of Ground Vehicle (GV) systems against Aerial Threats, and in particular, against miniature and small Unmanned Aerial Vehicles (UAVs). Small UAVs nowadays are low cost, sufficiently agile to fly aggressive maneuvers, and widely used by industry, academia, as well as hobbyists. Their simplicity, maneuverability and low cost make them a potential threat (surveillance, attack) against Ground Vehicles, either manned or unmanned, and personnel.
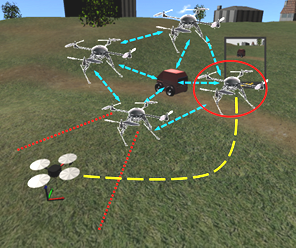
The Army is interested in enhancing the levels of active and passive protection of GVs, with Situational Awareness (or, see-understand-act) being the outermost level of survivability, and Hit-and-Kill Avoidance being the innermost level of survivability. GVs are in principle less agile than, and hence vulnerable to, small UAVs. It is thus of vital importance that GVs are equipped with systems that can detect and act against micro UAVs, so the operation of the latter in the vicinity of GVs is either eliminated, or sufficiently mitigated. The SQUAD project aims to address this need and will explore active countermeasures (both pro-active and re-active) against aerial threats, which not only will offer a powerful defensive system for GVs, but will furthermore increase the situational awareness of the Soldier in the GV. The proposed semi-autonomous system architecture employs a SQUAD comprising the Soldier/Ground Vehicle and friendly small UAVs (e.g., QUADrotors).
Publications:
- D. Panagou “A Distributed Feedback Motion Planning Protocol for Multiple Unicycle Agents of Different Classes”, IEEE Transactions on Automatic Control, Volume 62, no. 3, pp. 1178 - 1193, 2017. doi:10.1109/TAC.2016.2576020
- D. Panagou, D. M. Stipanovic and P. G. Voulgaris “Distributed dynamic coverage and avoidance control under anisotropic sensing”, IEEE Trans. on Control of Network Systems, 2016. doi:10.1109/TCNS.2016.2576403
- W. Bentz and D. Panagou “An Energy-aware Redistribution Method for Multi-Agent Dynamic Coverage Networks”, 2016 IEEE 55th Conference on Decision and Control (CDC), pp. 2644-2651, 2016. doi:10.1109/CDC.2016.7798661
- T. Hoang, E. Bayasgalan, Z. Wang, G. Tsechpenakis and D. Panagou, “Vision-based target tracking and autonomous landing of a quadrotor on a ground vehicle,” 2017 American Control Conference (ACC), pp. 5580-5585, 2017. doi:10.23919/ACC.2017.7963823
- M. Sutorius and D. Panagou “Decentralized Hybrid Control for Multi-Agent Motion Planning and Coordination in Polygonal Environments”, 20th IFAC World Congress, Toulouse, France, July 2017.
- W. Bentz and D. Panagou, “3D dynamic coverage and avoidance control in power-constrained UAV surveillance networks,” 2017 International Conference on Unmanned Aircraft Systems (ICUAS), pp. 1-10, 2017. doi:10.1109/ICUAS.2017.7991388
- W. Bentz, T. Hoang, E. Bayasgalan and D. Panagou “Complete 3-D Dynamic Coverage in Energy-constrained Multi-UAV Sensor Networks”, Autonomous Robots, pp 1-27, 2017. doi:10.1007/s10514-017-9661-x
- M. Coon and D. Panagou “Control Strategies for Multiplayer Target-Attacker-Defender Differential Games with Double Integrator Dynamics”, IEEE Conference on Decision on Control, 2017.
- J. Usevitch and D. Panagou “r-Robustness and (r,s)-Robustness of Circulant Graphs”, IEEE Conference on Decision on Control, 2017.
- W. Bentz and D. Panagou “Persistent Coverage of a Two-dimensional Manifold Subject to Time-varying Disturbances”, IEEE Conference on Decision on Control, 2017.
- D. Han and D. Panagou “Distributed Multi-task Formation Control under Parametric Communication Uncertainties”, IEEE Conference on Decision on Control, 2017.
- D. Han and D. Panagou “Chebyshev Approximation and Higher Order Derivatives of Lyapunov Functions for Estimating the Domain of Attraction”, IEEE Conference on Decision and Control, 2017.
- K. Garg, D. Han and D. Panagou “Robust Semi-Cooperative Multi-Agent Coordination in the Presence of Stochastic Disturbances”, IEEE Conference on Decision on Control, 2017.
References:
- D. Panagou, D. M. Stipanovic and P. G. Voulgaris “Dynamic coverage control in unicycle multi-robot networks under anisotropic sensing”, Frontiers in Robotics and AI: Multi-Robot Systems, March 2015, doi: 10.3389/frobt.2015.00003
- D. Panagou, D. M. Stipanovic, and P. G. Voulgaris “Vision-based dynamic coverage control for nonholonomic agents”, 53rd IEEE Conf. on Decision and Control, Los Angeles, CA, Dec. 2014