
Vehicle Controls & Behaviors
Annual PlanPhysics-Based Multiscale Continuum-Discrete Deformable Terrain Model for Off-Road Mobility Simulation
Project Team
Government
Paramsothy Jayakumar, Yeefeng Ruan, U.S. Army GVSC
Faculty
Hiroki Yamashita, University of Iowa
Industry
Mustafa Alsaleh, Caterpillar Inc.
Student
Guanchu Chen,, University of Iowa
Project Summary
Project began in 2017 and is ongoing.
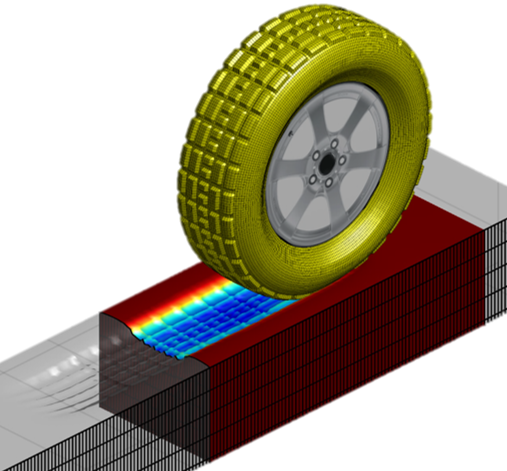
The primary objective of this project is to develop a new multiscale continuum-discrete deformable terrain dynamics model suited for physics-based off-road mobility simulation. To this end, FE-DE (finite element - discrete element) multiscale computational soil models for tire-terrain interaction will be developed that can be fully integrated into a multibody dynamics off-road mobility simulation and compared with single-scale FE and DE models to quantitatively assess the multiscale simulation capabilities for off-road mobility performance prediction.
Of itself, this comparative performance evaluation will comprise a comprehensive effort to facilitate better understanding of the multiscale approach for tire-terrain interaction problems based on a unified performance metric. This evaluation will also provide important information on the appropriate selection of simulation tools and models for operational planning for GVSC.
A high-fidelity computational model for deformable terrains is essential for physics-based off-road mobility simulation in achieving accurate mobility performance prediction as well as reliable operational planning. Granular terrain dynamics is complex, involving highly nonlinear anisotropy of strength, strain localization, and solid-fluid state transition. Whereas the use of empirical or simplified models can lead to unrealistic prediction of mobility performance, physics-based modeling becomes critically important in predicting such nonlinear deformable soil behavior.
GVSC has taken a leading role in developing the Next Generation NATO Reference Mobility Model (NG-NRMM) to replace existing empirical simulation models with physics-based models to enhance off-road mobility performance prediction capabilities. High-fidelity terrain dynamics model is one of the priority objectives in the NG-NRMM. In this proposed research, we will develop a new physics-based multiscale continuum-discrete deformable terrain model suited for physics-based off-road mobility simulation.
Publications:
- Yamashita, H., Chen, G., Brauchler, A., Ruan, Y., Jayakumar, P. and Sugiyama, H., 2018, “Computer Implementation of Hierarchical FE-DE Multiscale Approach For Modeling Deformable Soil in Multibody Dynamics Simulation”, Proceedings of ASME International Conference on Multibody Systems, Nonlinear Dynamics, and Control (ASME DETC2018-86110), Quebec City, Quebec, Canada.
- Yamashita, H., Jayakumar, P., Alsaleh, M. and Sugiyama, H., 2017, “Physics-Based Deformable Tire-Soil Interaction Model for Off-Road Mobility Simulation and Experimental Validation”, ASME Journal of Computational and Nonlinear Dynamics, vol. 13, pp. 021002-1-15.
Publications from Prior Work:
- Yamashita, H., Jayakumar, P., Alsaleh, M. and Sugiyama, H., 2018, “Physics-Based Deformable Tire-Soil Interaction Model for Off-Road Mobility Simulation and Experimental Validation”, ASME Journal of Computational and Nonlinear Dynamics, doi: 10.1115/1.4037994.
- Yamashita, H., Jayakumar, P. and Sugiyama, H., 2016, “Physics-Based Flexible Tire Model Integrated with LuGre Tire Friction for Transient Braking and Cornering Analysis”, ASME Journal of Computational and Nonlinear Dynamics, vol. 11, pp. 031017-1-17.
- Recuero, A., Serban, R., Peterson, B.*, Sugiyama, H., Jayakumar, P. and Negrut, D., 2017, “High-Fidelity Approach for Vehicle Mobility Simulation: Nonlinear Finite Element Tires Operating on Granular Material”, Journal of Terramechanics, vol. 72, pp. 39-54.
- Yamashita, H., Valkeapää, A., Jayakumar, P. and Sugiyama, H., 2015, “Continuum Mechanics Based Bi- Linear Shear Deformable Shell Element Using Absolute Nodal Coordinate Formulation”, ASME Journal of Computational and Nonlinear Dynamics, vol. 10, pp. 051012-1-9.