
Vehicle Controls & Behaviors
Annual PlanPhysics Augmented Artificial Intelligence
Project Team
Government
David Gorsich, Christian Balas, Andrea Simon, U.S. Army GVSC
Industry
Eric Tseng, Ford Motor Company
Student
Yiqun Dong (post-doc), University of Michigan
Project Summary
Project began in 2018.
Artificial intelligence (AI) is identified as a key future competitive strategy by GVSC and autonomous driving is one of the high-potential applications of AI. Most of the current Convolutional/Deep Neural Networks (CNN/DNN) approaches to AI do not have a clear way to leverage physics, dynamic models or other sensor measurement.
This research aims to study an alternative approach to mainstream AI study. The main objective is to study, analyze, and explore the best way to used physics-based knowledge and model to complement the performance of CNNs/DNNs. The goal is to achieve better performance, better robustness and reduce training/computation load.
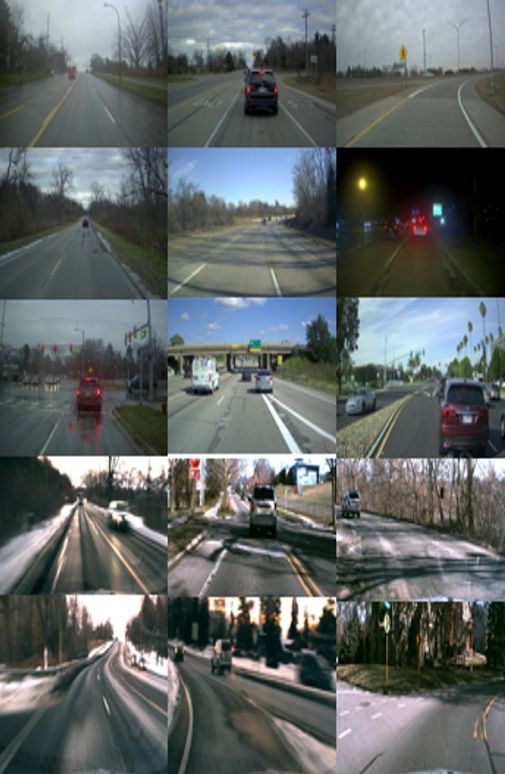
GVSC researchers will benefit from solid deliverables from this research, namely: have images collected both from open sources as well as from the MCity test vehicle, organized and lane-detection results generated; have the two physics-enhanced DNN solutions developed, hopefully having better accuracy and robustness, compared with the DNN-only solutions; learning from this exercise should inspire further development, with best practice summarized in our final report/papers.
Publications from Prior Work:
- Chen, Yuxiao, Huei Peng, and Jessy Grizzle. “Obstacle Avoidance for Low-Speed Autonomous Vehicles With Barrier Function.” IEEE Transactions on Control Systems Technology (2017).
- Nilsson, Petter, Omar Hussien, Ayca Balkan, Yuxiao Chen, Aaron D. Ames, Jessy W. Grizzle, Necmiye Ozay, Huei Peng, and Paulo Tabuada. “Correct-by-construction adaptive cruise control: Two approaches.” IEEE Transactions on Control Systems Technology 24, no. 4 (2016): 1294-1307.
- Zhao, Ding, Henry Lam, Huei Peng, Shan Bao, David J. LeBlanc, Kazutoshi Nobukawa, and Christopher S. Pan. “Accelerated evaluation of automated vehicles safety in lane-change scenarios based on importance sampling techniques.” IEEE transactions on intelligent transportation systems (2016).
- J. Yoon, H. Peng, “A Cost-Effective Sideslip Estimation Method Using Velocity Measurements from Two GPS Receivers,” IEEE Trans. On Vehicular Technologies, Volume:63 Issue:6, July 2014, pp. 2589 - 2599.
- R. Sharp and H. Peng, “Vehicle Dynamics Applications of Optimal Control Theory,” Vehicle System Dynamics, Vol.49, No.7, July 2011, pp.1073-1111.
- R. Bis, H. Peng and A.G. Ulsoy, “Velocity Occupancy Space: Autonomous Navigation in an Uncertain, Dynamic Environment,” International Journal of Vehicle Autonomous Systems, 2012 Vol.10, No.½, pp.41 - 66.